ПО предназначено для графического программирования алгоритмов поведения робота.
И дальнейшего выполнения заданных алгоритмов.
ПО состоит из двух частей:
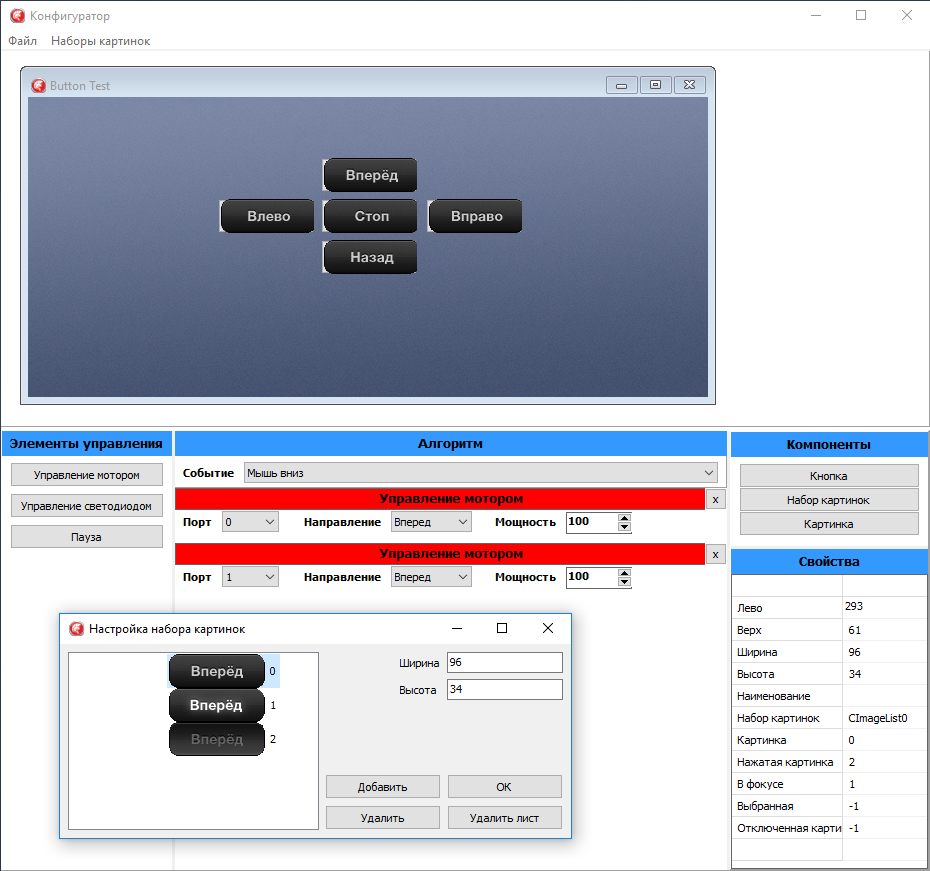
1. Конфигуратор – позволяет создавать графический интерфейс пользователя и связывать сч событиями интерфейса различные алгоритмы которые так же создаются в этом конфигураторе.
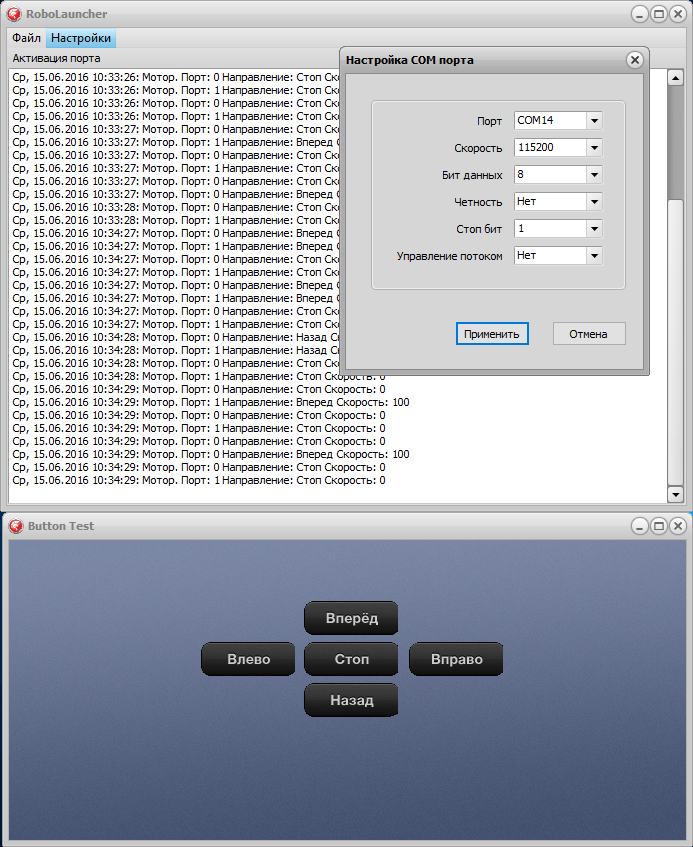
2. Исполнитель – позволяет запускать созданные в конфигураторе проекты на исполнение.